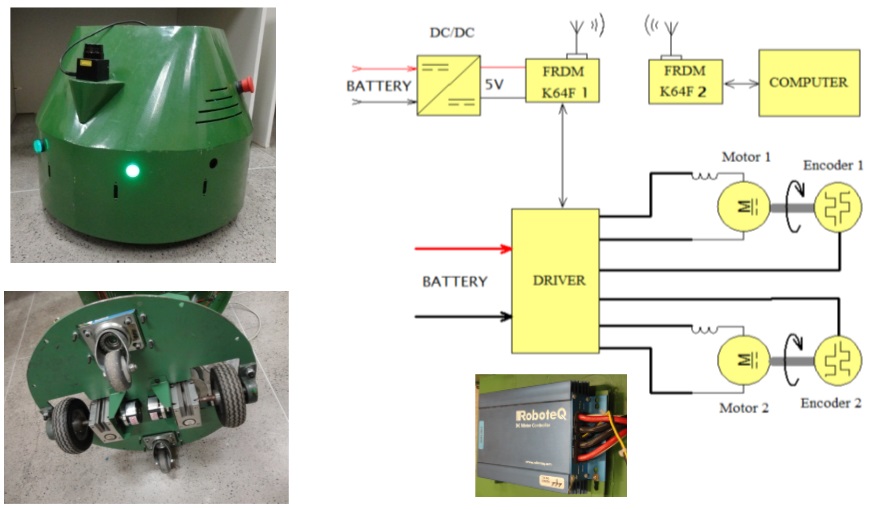
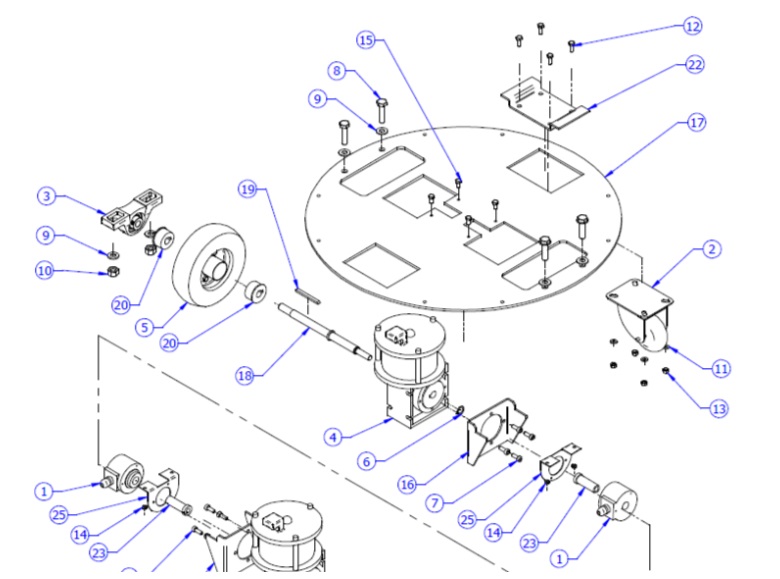
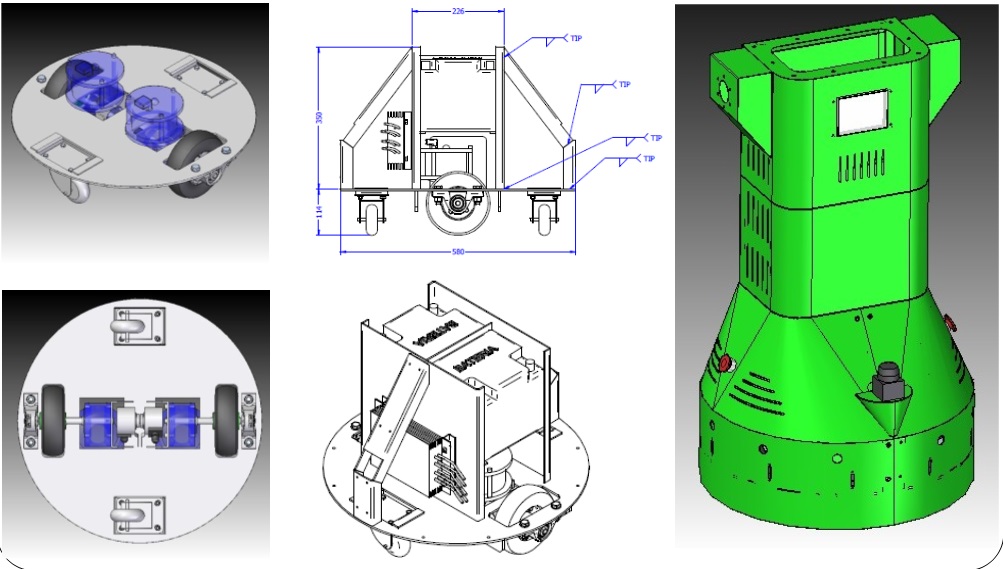
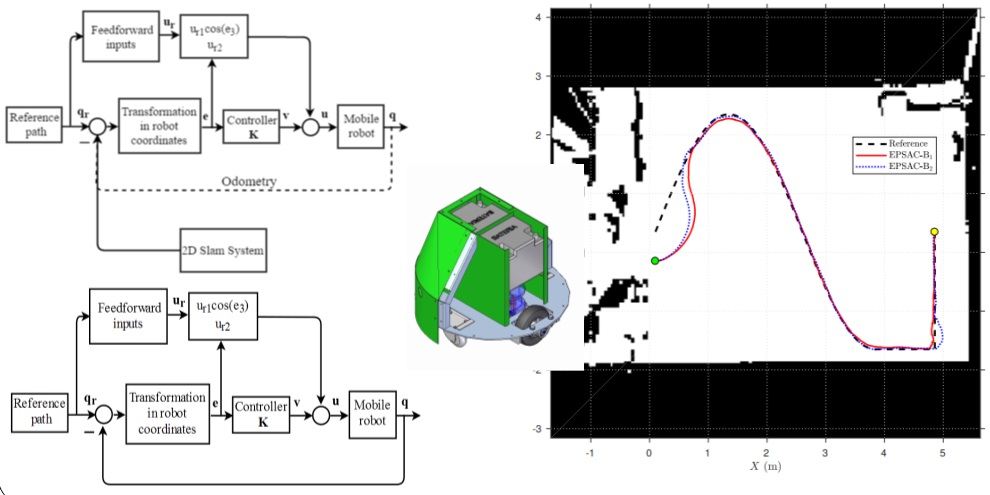
Development of a non-holonomic robot equipped with sensory fusion system that allows the follow-up of reference trajectories through media information. The problem of track tracking path is being studied through linear, nonlinear and adaptive predictive controllers. Trajectory planning techniques and SLAM are also being studied in order to avoid unforeseen obstacles.