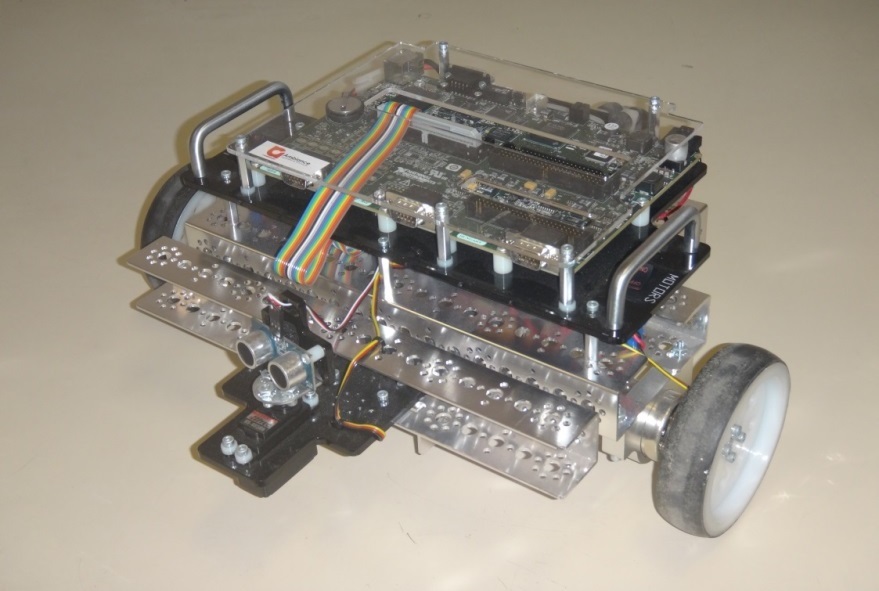
This project aims to proposition, implement and test new control techniques for tracking reference trajectories by a non-holonomic differential traction robot.