A station Terrestrial laser is commonly used in topographic surveys, Analysis of areas, constructions, objects, vegetation, among Other applications. Due to these applications and the complexity of Cases of study this equipment was developed by the team of GPAR Research.
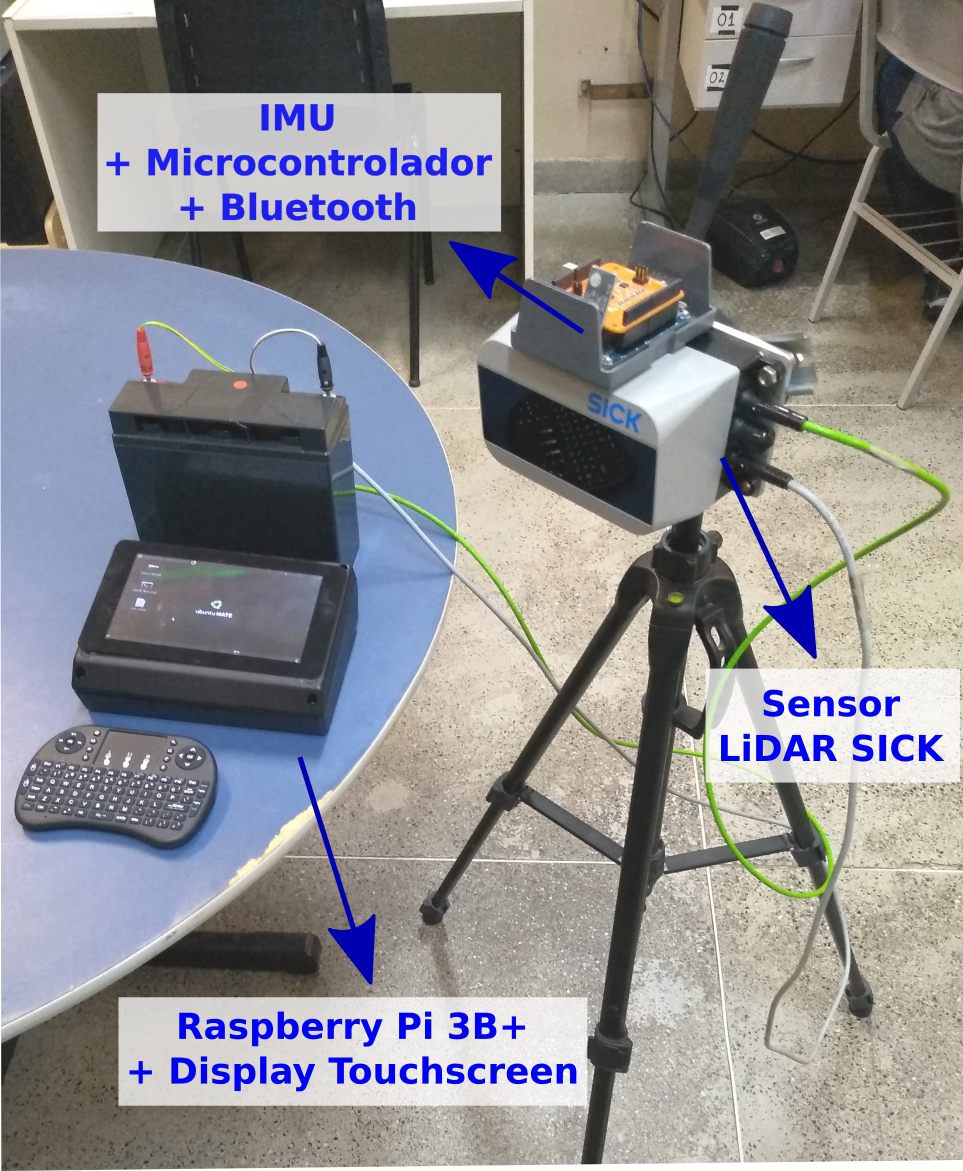
The equipment Consists of a Handle sensor (Light Detection and Ranging), Able to capture data from a region by generating a point cloud, a Geopositioning system, known as IMU (Inertial Measurment Unit) An accelerometer, gyroscope and magnetometer, and by End, a base to sustain moving the set of sensors.
A Of the problems dealt with in this equipment is the acquisition of Data and sensory fusion of them. That is, reading the The IMU and LiDAR information and to design a cloud of Points consistent with the mapped location/object. This sensory fusion is Using techniques such as Kalman filter to attenuate Inaccuracies of readings. All this processing is done using A microcontroller containing ROS (Robot Operating System).
With the equipment mounted some tests and analysis of the cloud of Resulting points can be analysed. The figures present the Complete equipment and the result of an assay using a LiDAR LD-MRS 420201.