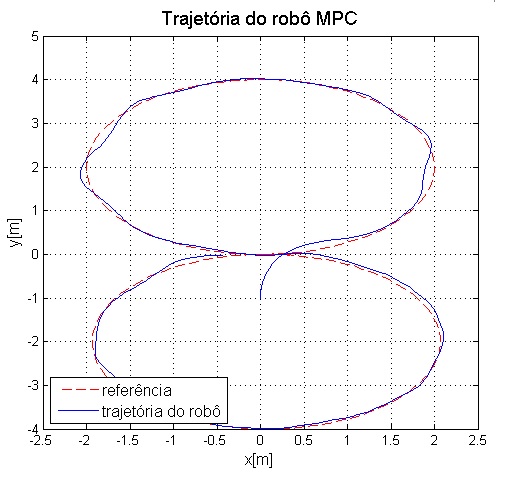
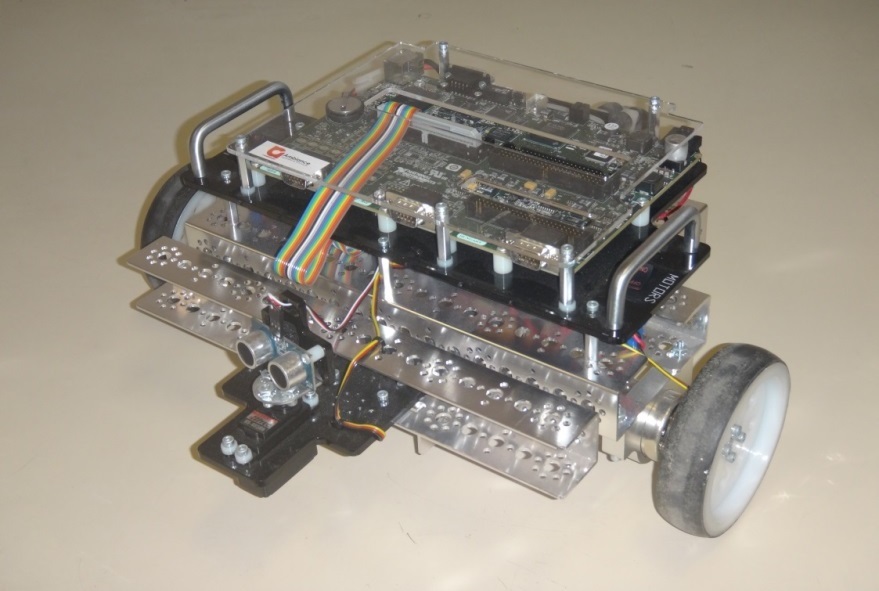
Esse projeto tem como objetivo a proposição, implementação e testes de novas técnicas de controle para seguimento de trajetórias de referência por um robô de tração diferencial não-holonômico.