Desenvolvimento de uma Nova Solução para Monitoramento de Estoque de Carvão no Pátio da UTE Pécem Baseado em um Sistema Automático de Aquisição Aérea de Dados.
O Grupo de Pesquisa em Automação Controle e Robótica (GPAR) possui um protótipo e um modelo comercial de incubadora neonatal onde são realizados os estudos de controle de temperatura e umidade relativa.
Desenvolvimento de robô AGV e estratégias de seguimento de trajetórias para aplicações em automação industrial
Robô outdoor de exploração e varredura laser 3D. Conta com sistema de controle avançado.
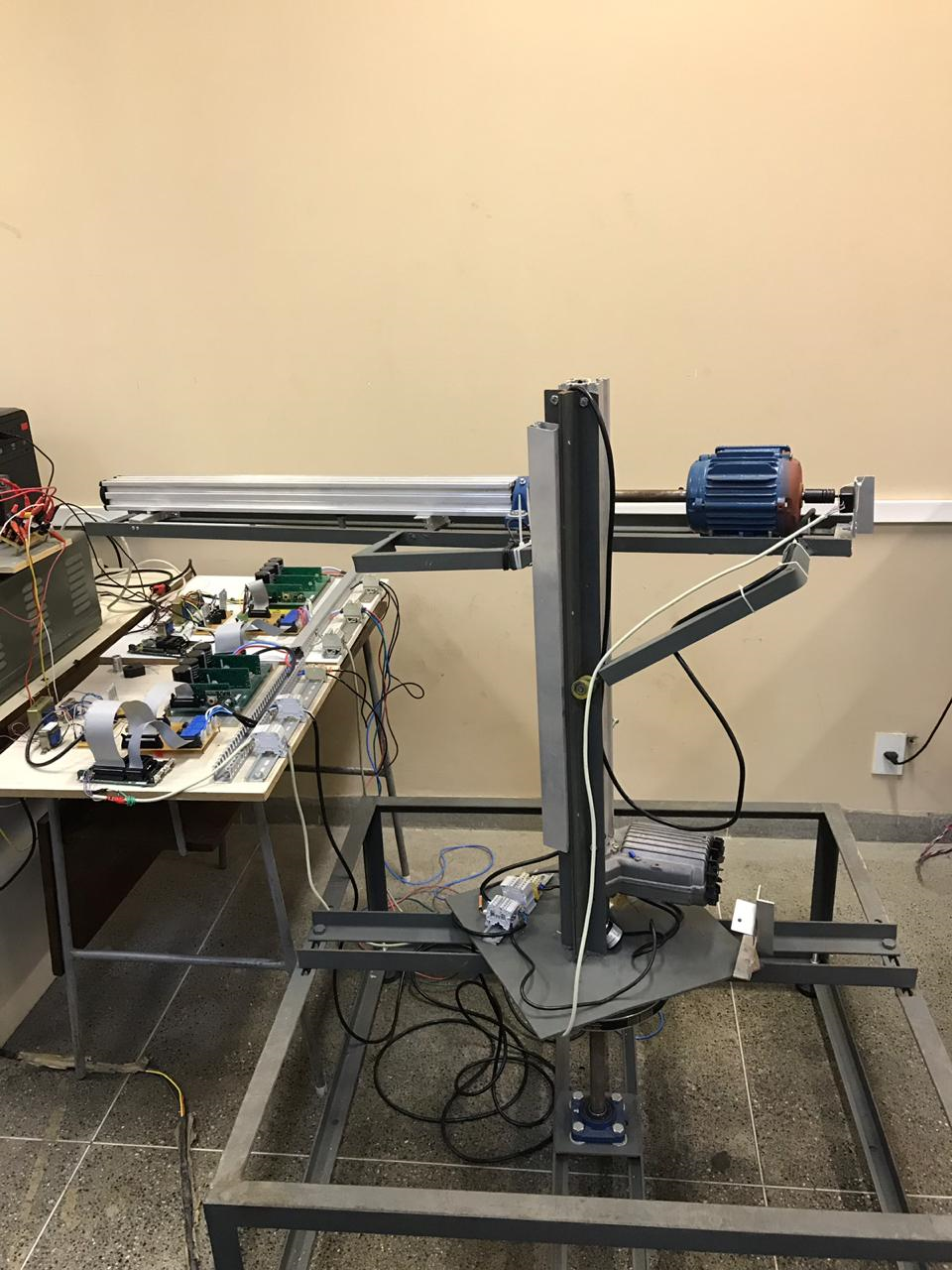
Sistema de geração baseado em máquina DFIG e emulador de turbina eólica
Controle de Motor de relutância trifásico
Controle de braço Robô com 3 graus de liberdade equipado com motores de indução.
Desenvolvimento de estratégias de controle preditivo para seguimentos de trajetórias por robô móvel com tração diferencial
Desenvolvimento de estação 3d laser para aplicações em topografia, mineração, engenharia civil e sensoriamento remoto.