Development of a new solution for monitoring coal stocks in the patio of UTE Pécem based on an automatic system of aerial data acquisition.
The research group on Automation control and robotics (GPAR) has a prototype and a commercial model of neonatal incubator where the studies of temperature control and relative humidity are performed.
Development of AGV robot and trajectory tracking strategies for applications in industrial automation
Outdoor robot exploration and 3D laser scanning. It has advanced control system.
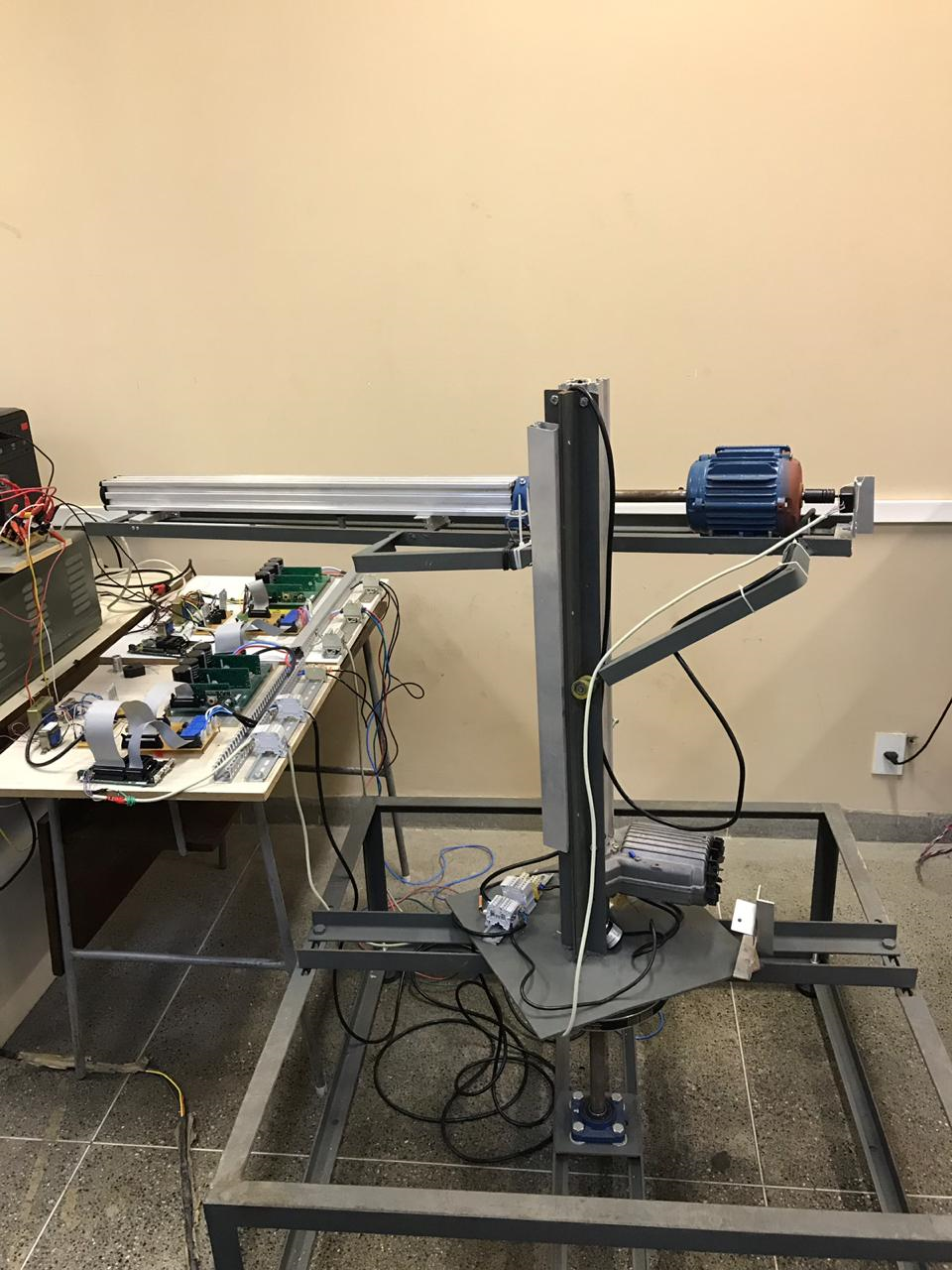
Generation system based on DFIG machine and wind turbine emulator
Three-phase reluctance engine control
Robot arm control with 3 degrees of freedom equipped with induction motors.
Development of predictive control strategies for tracking trajectories by mobile robot with differential traction
Development of 3D laser station for applications in topography, mining, civil engineering and remote sensing.