Os manipuladores presentes hoje na indústria se utilizam, em sua maioria, de servomotores de corrente contínua. Apesar da facilidade de modelagem e controle deste tipo de máquina, sua manutenção é dispendiosa devido a quantidade de componentes e ao contato mecânico de suas partes. Os motores de indução trifásico (MIT) do tipo “gaiola de esquilo”, por sua vez são motores de construção simples, mais baratos e de manutenção fácil, além de uma maior robustez se comparado a outros tipos de máquinas elétricas, sua utilização na indústria é bastante difundida. O GPAR possui pesquisas em robótica industrial como o presente projeto, envolvendo áreas de Identificação de sistemas, Sistemas embarcados, Controle, Inteligência Computacional e Processamento de imagem.
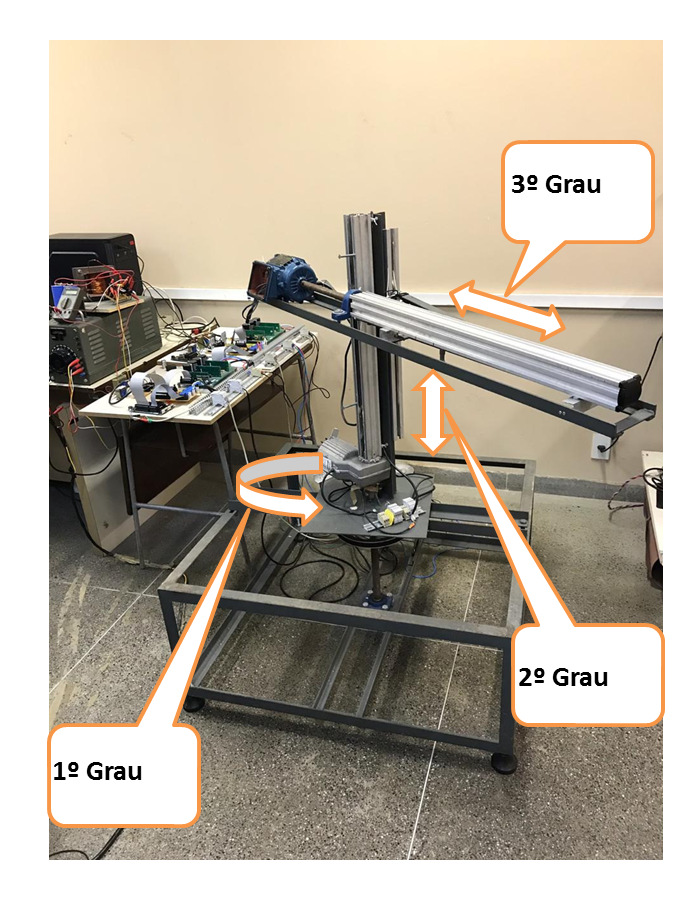
O manipulador da pesquisa é do tipo cilíndrico e possui 3 graus de liberdade, o primeiro grau é a base que tem movimentos rotativos, o 2º grau é linear que é o tronco que faz os movimentos na vertical, o terceiro grau é o que faz os movimentos na horizontal. O manipulador possui as juntas acionadas com motores de indução trifásicos.
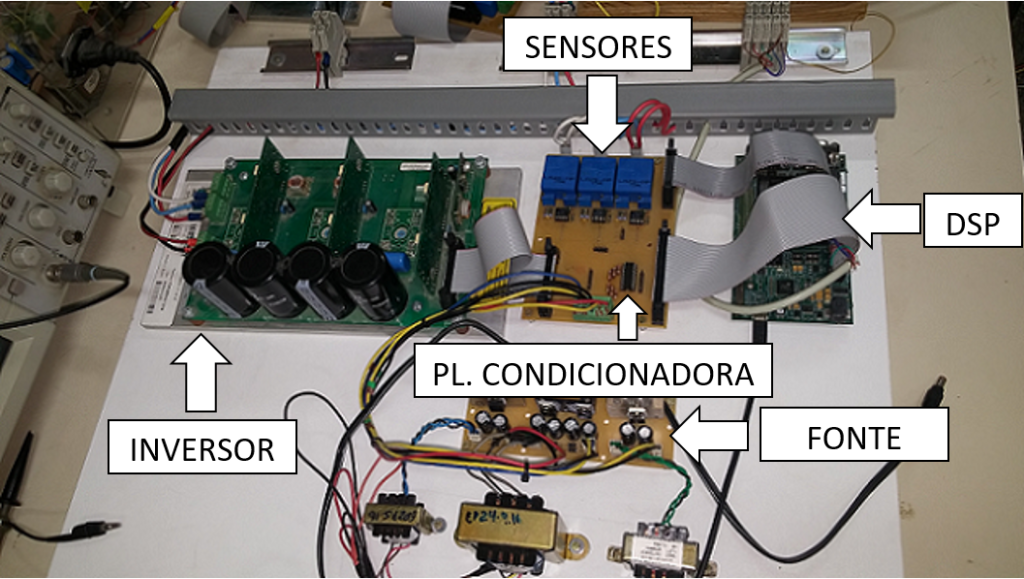
Para o acionamento do Manipulador foi preciso o uso de um microcontrolador DSP (processador de sinal digital) da Texas instruments. A principal vantagem do mesmo, é que além do alto desempenho é a capacidade de realizar 150 MPIS (milhões de instruções por segundo), o apoio intrínseco à modulação espacial vetorial, SVPWM. A interface de programação é o CCS, que será implementado em C, com uma comunidade muito ampla (L. R. REBOUÇAS, 2015).
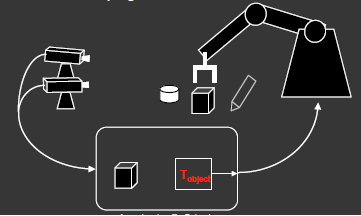
Ainda o trabalho conta com uma parte de processamento de imagem para auxiliar na realização das tarefas com uma câmera na parte externa. Será usado um chip da Sipeed Maix Bit que tem a configuração de 400 Mega-hertz, dual core e 64 bits, juntamente com uma ferramenta MaixPy (MicroPython) utilizando o sistema de reconhecimento de imagem Yolo (You Only Look Once). O esboço da planta final como exemplo ficaria conforme a Figura abaixo.
Trabalhos aceitos para publicação e publicados até Setembro de 2019.
- D. A. Souza, L. L. N. dos Reis, J. G. Batista, J. R. Costa, A. B. S. Junior, J. P. B. Araújo, A. P. S. Braga.Nonlinear Identification of a Robotic Arm using Machine Learning Techniques. 7th World Conference on Information Systems and Technologies, La Toja Island, Galicia, Spain, 2019; (Publicado)
- D. A. Souza, L. L. N. dos Reis, J. G. Batista, J. R. Costa, A. B. S. Junior, J. P. B. Araújo, A. P. S. Braga. Nonlinear Identification of a Robotic Arm. Advances in Intelligent Systems and Computing, 2019; (Publicado);
- D. A. Souza et al. Identificação com uma Variação de Mínimos Quadrados Recursivo aplicado a um Manipulador Robótico. SBAI, Ouro Preto-MG, 2019. (Aceito para publicação);
- J. G. Batista et al. Modelagem Dinâmica e Simulação de um Controlador PID e LQR para um Manipulador Cilíndrico. SBAI, Ouro Preto-MG, 2019. (Aceito para publicação);
- D. A. Souza et al. Identification of the Recursive Least Squares with RMO applied to a Robotic Manipulator. Artificial Intelligence for Industries, Laguna Hills, California EUA, 2019. (Aceito para publicação).
- J. G. Batista et al. Performance Comparison Between the PID and LQR Controllers Applied to a Robotic Manipulator Joint. Lisboa, Portugal. IECON, 2019. (Aceito para publicação).
Integrantes
Laurinda Lúcia Nogueira dos Reis – Dra.
Antonio Barbosa de Souza Júnior – Dr.
Darielson Araújo de Souza – Aluno de Doutorado.
Josias Guimarães Batista – Aluno de Doutorado.
José Nogueira do Nascimento Júnior – Aluno de Mestrado.
José Raimundo de Oliveira Júnior – Aluno de Graduação.